В последнее десятилетие применение дронов становится все более популярным. Аэрофотосъемка, наблюдение и инспекции, кино- и телевизионные развлечения, транспорт, сельское и лесное хозяйство, полицейская безопасность, геодезия и картографирование, логистика и другие области показали значительный рост спроса на дроны.
Источником питания четырехроторного дрона в основном являются четыре двигателя. Электрическая энергия, вырабатываемая двигателем, преобразуется в механизмы для вращения пропеллера дрона для достижения полета. Двигатель в основном состоит из статора, ротора, железного сердечника, магнитов и т.д. В основном используются щеточные и бесщеточные двигатели.
Основная конструкция электродвигателя с щеткой включает статор, ротор и щетку. Щетки находятся в постоянном контакте с рулевым механизмом и играют роль в проводимости и коммутации во время вращения. Они получают вращающий момент за счет вращающегося магнитного поля и вырабатывают электрическую энергию.
Основными компонентами бесщеточного двигателя являются статор, ротор, датчик положения и схема электронного переключателя. Однако, чтобы уменьшить вес моделей самолетов и небольших дронов, в конструкции дрона нет датчика положения, а вместо него используется электроника. регулятор. Что касается типа ротора, то большинство бесщеточных двигателей беспилотных летательных аппаратов имеют роторы, отличные от роторов.
Сравнивая два двигателя, щеточный двигатель может работать непрерывно около 5000 часов и имеет срок службы от 2-3 лет; в то время как бесщеточный двигатель может работать непрерывно более 20 000 часов, а срок службы в 2-3 раза больше, чем у щеточного двигателя. Его можно использовать в течение 7-10 лет. В то же время бесщеточный двигатель более энергосберегающий, и его потребляемая мощность составляет всего 1/3 от мощности двигателя с щеткой.
Хотя электронная схема переключения бесщеточного двигателя постоянного тока очень сложна по сравнению с аналогичными продуктами, исходя из таких соображений, как стабильность, рабочий шум, механические характеристики, электромагнитные помехи, срок службы, мощность на единицу объема, отношение крутящего момента к весу, энергопотребление и т.д. Двигатель BLDC является основным выбором для двигателей квадрокоптеров-дронов.
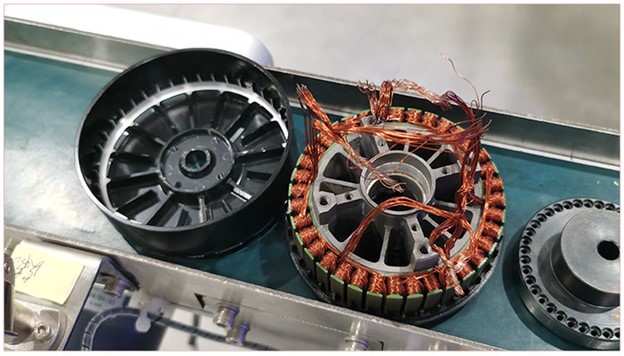
Источником питания четырехроторного беспилотного летательного аппарата является двигатель, приводящий во вращение вращающийся пропеллер. В процессе преобразования электрической и кинетической энергии бесщеточным двигателем внешний ротор должен непрерывно вращаться. Внешний ротор представляет собой цилиндр, внутри которого обычно находится постоянный редкоземельный магнит: (самарий кобальт) SmCo или (неодим железо бор) NdFeBo. Статор сформирован из катушек, намотанных на полярный железный сердечник из ферромагнитного материала. По мере циркуляции тока по катушкам создаются новые магнитные полюса, которые взаимодействуют с постоянными магнитными полюсами ротора, заставляя машину вращаться.
Квадрокоптер БПЛА BLDC с внешним ротором
Внутренняя часть внешнего ротора статична, а внешняя оболочка вращается. Вообще говоря, встроенная часть из магнитной стали (постоянный магнит) будет вращаться, но часть катушки не вращается, тем самым достигается преобразование энергии.
Преимущества внешнего ротора также отражаются на вращении. Полностью закрытая конструкция позволяет внешнему ротору быстро работать после запуска, с низким общим энергопотреблением и высокой скоростью вращения, демонстрируя высокую эффективность. Однако существуют также проблемы, такие как большая инерция ротора и громкий шум, поэтому к внешнему ротору предъявляются более высокие требования к качеству. Во время обработки и производства внешних компонентов ротора могут возникать такие проблемы, как неравномерность материалов, дефекты заготовок, допуски на обработку и сборку и т.д. Дисбаланс каждого компонента будет накапливаться в процессе сборки, что приведет к большому первоначальному дисбалансу собранного внешнего ротора. Если это не исправить должным образом, это вызовет сильную вибрацию и громкий шум, которые в тяжелых случаях могут повлиять на полет дрона.
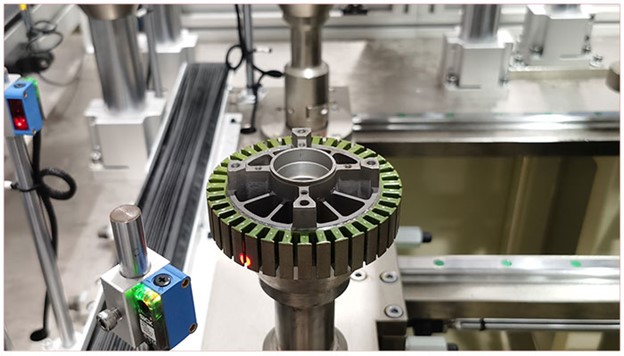
Квадрокоптер БПЛА BLDC stator winding
Структура обмотки статора дрона-квадрокоптера напрямую определяет эффективность двигателя. Хорошая структура обмотки может снизить сопротивление при проведении тока и повысить КПД двигателя. При производстве бесщеточных двигателей для дронов процесс намотки очень важен. Если эффект намотки плохой, это напрямую повлияет на использование дрона. В NIDE беспилотная машина для намотки статора бесщеточного двигателя использует технологию автоматической намотки для удовлетворения потребностей одновременной намотки нескольких моторных изделий с высокой эффективностью и точностью.
1 、 Процесс линии сборки статора
1.1 Порошковое покрытие статора
1.2 Загрузка железного сердечника
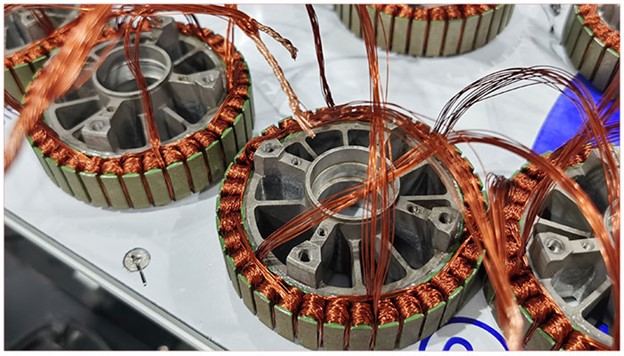
1.3 Намотка катушки
Структура намотки: Структура обмотки двигателя напрямую определяет КПД двигателя. Хорошая структура намотки может снизить сопротивление при подаче тока и повысить КПД двигателя. Двигатель дрона будет выделять много тепла при работе на высокой скорости. Если тепло не удастся вовремя отводить, это повлияет на срок службы и производительность двигателя. Поэтому необходимо принять некоторые меры по отводу тепла, такие как установка радиаторов и дополнительных отверстий для отвода тепла. В то же время выбор высококачественного двигателя также может улучшить эффект отвода тепла. При производстве бесщеточных двигателей для дронов процесс намотки очень важен. Если эффект намотки плохой, это напрямую повлияет на использование дрона. Машина для намотки внешнего ротора беспилотного двигателя Nida использует технологию автоматической намотки для удовлетворения потребностей одновременной намотки нескольких моторных изделий с высокой эффективностью и точностью.
1.4 Чередование
1.5 Пайка и термоусадочная трубка
1.6 Испытание статора
1.7 Склеивание идентификатора статора
1.8 Фланцевый вал и статор в сборе (включая фланцевый вал и опрессовку подшипника)
1.9 Отверждение статора
2 、 Процесс конвейерной сборки ротора
2.1 Вал и корпус ротора в сборе
2.2 Склеивание и вставка магнита
2.3 Отверждение ротора
Проверка биения 2.4
2.5 Балансировка ротора
2.6 Проверка поверхности магнитом
3 、 Процесс окончательной сборки на конвейере
3.1 Статор и ротор в сборе
3.2 Кольцо, стопорное кольцо в сборе
3.3 Сборка термоусадочной трубки
3.4 Испытание крутящего момента
3.5 Старение
3.6 Лазерная маркировка
3.7 Упаковка